- KATOの世界
トルメキア軍自走砲 ~履帯を作ってみた!~ その2
今月は工場の移転作業がありバタバタです。
スタッフKATOです。
こんにちは。
新工場では今までと勝手が違い、何気ない作業にも難儀することが想定されます。
削り出し作業は移転前にできるだけ進めておきたいところ。
工場でなくてもできる作業は持ち帰り、自宅でコツコツ進めています。
トルメキア軍自走砲の履帯製作の続きです。
前回までに必要なパーツの削り出しは完了しました。
今回はそのパーツを連結していきます。
まず、0.5mmのアルミ線を3mm程度の長さで切断します。
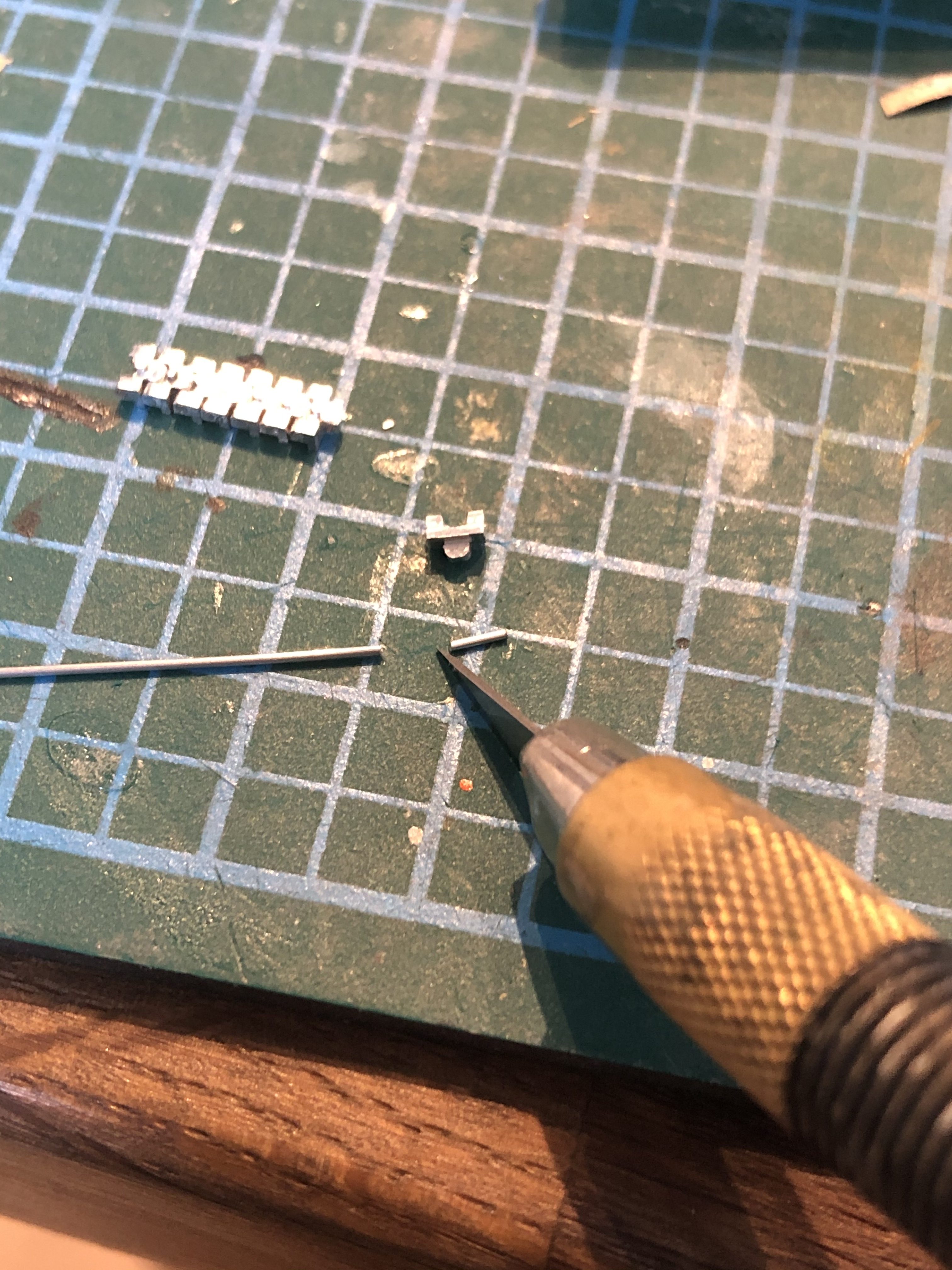
履板パーツ2個を用意し、それぞれの凸と凹をはめ合わせ、側面の穴にアルミ線を通します。
履板は幅2.9mmで作製しているので、3mmで切断したアルミ線は少し飛び出す感じになります。
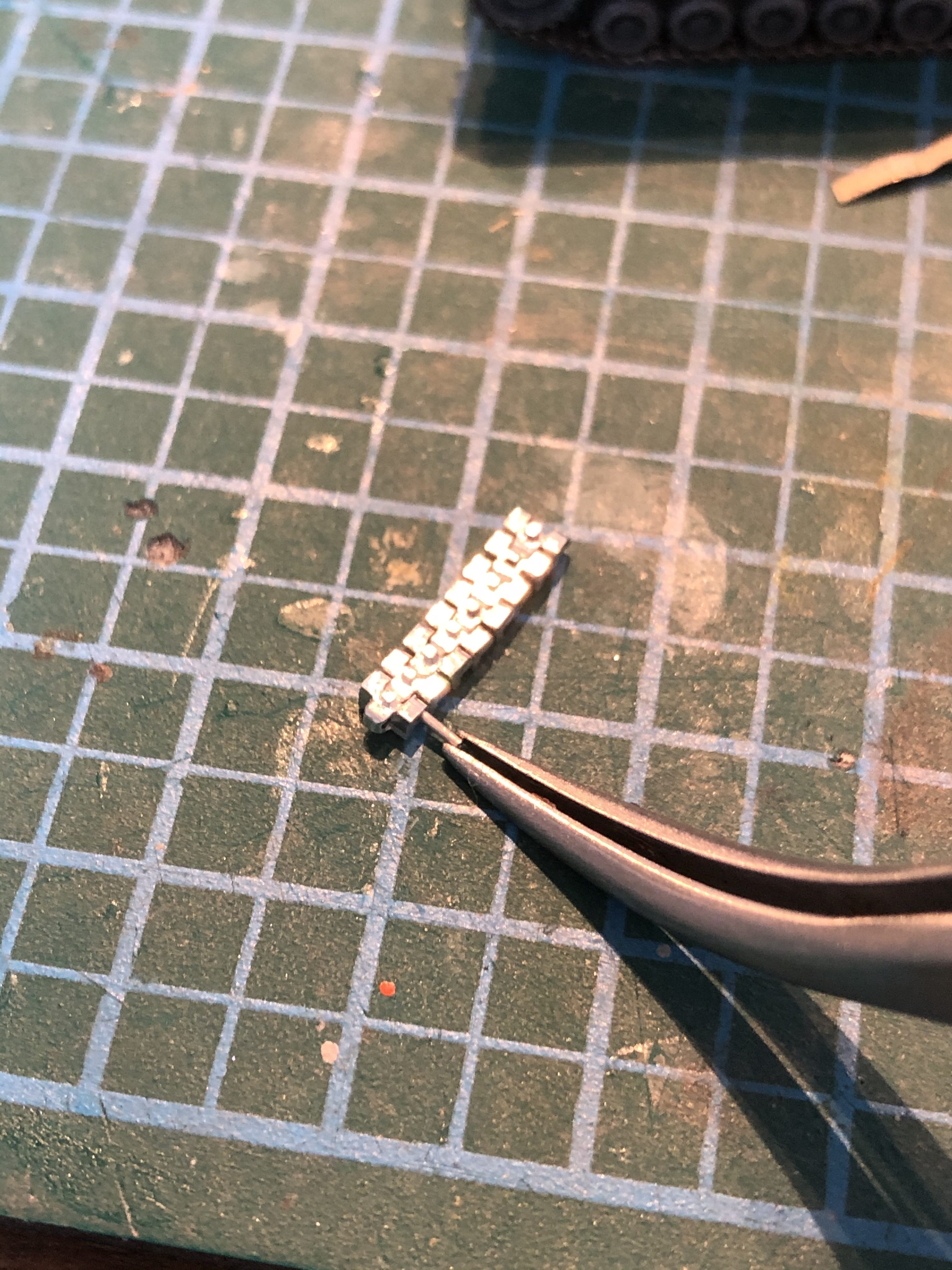
この飛び出した部分を万力で挟んで潰し固定します。

この作業をひたすら繰り返せば、履帯の完成です。

1本約50個連結するのに3時間ほどかかりました。
CAD上では1本あたり55個連結すると1周する計算ですが、
実際には連結部に可動のためのクリアランスがあるので、それより少ない数になるはず。
正確な個数が知りたくて、再現して検証してみることに。
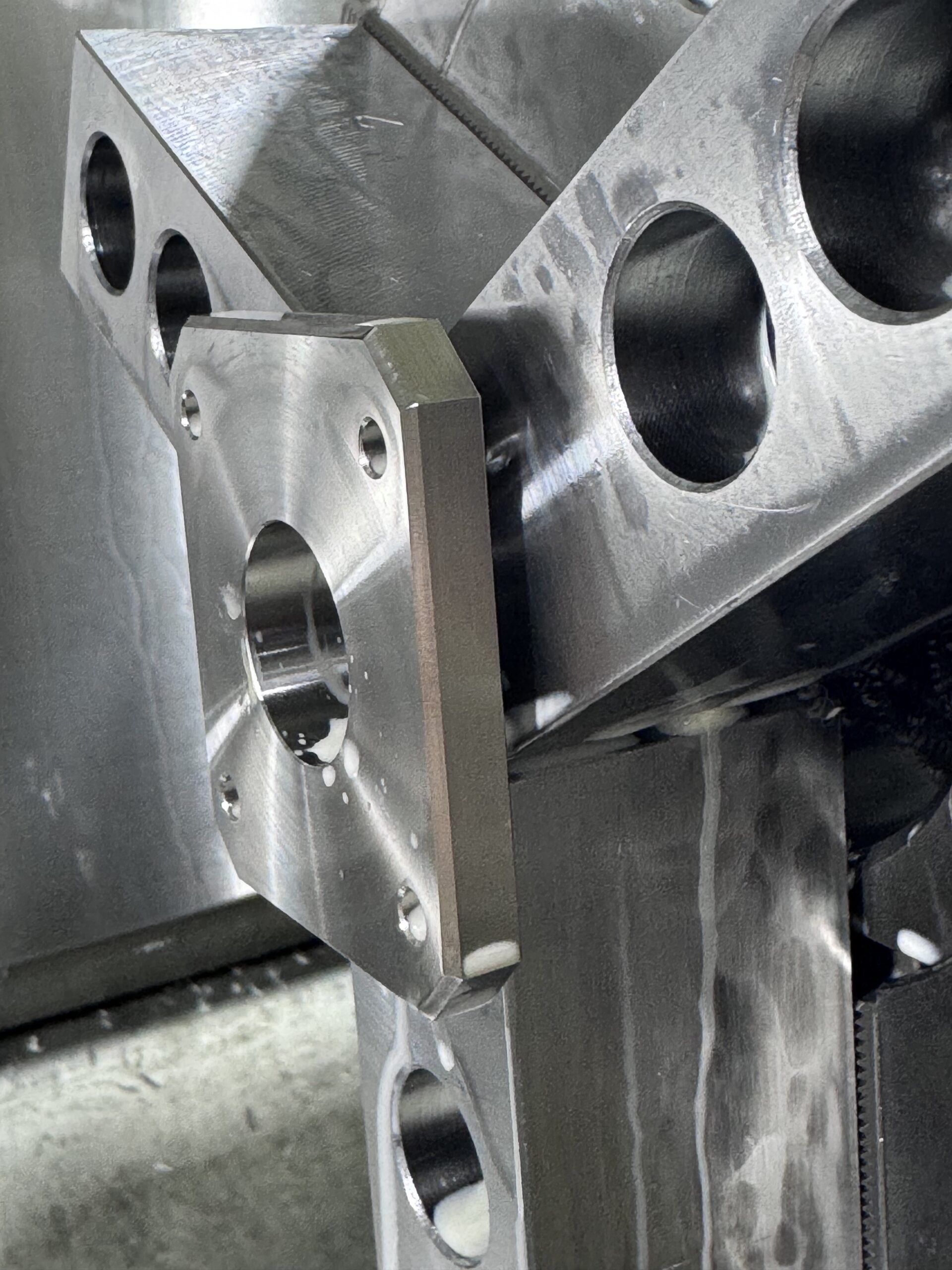
まず、起動輪と誘導輪、転輪を製作しました。

起動輪と誘導輪の外周はφ5mm、転輪の外周はφ3.5mm、軸径は全て1.1mmとしています。
本来起動輪の外周部には履帯と噛み合う歯がついていますがそれは省略し、誘導輪と共通のデザインとしました。
次にアルミの端材を用意し、各種転輪が配置される部分にφ1mmの穴をあけます。
あけた穴に1mmの軸を差し込み、その軸に転輪を通し、履帯を巻いていきます。
出来ました!
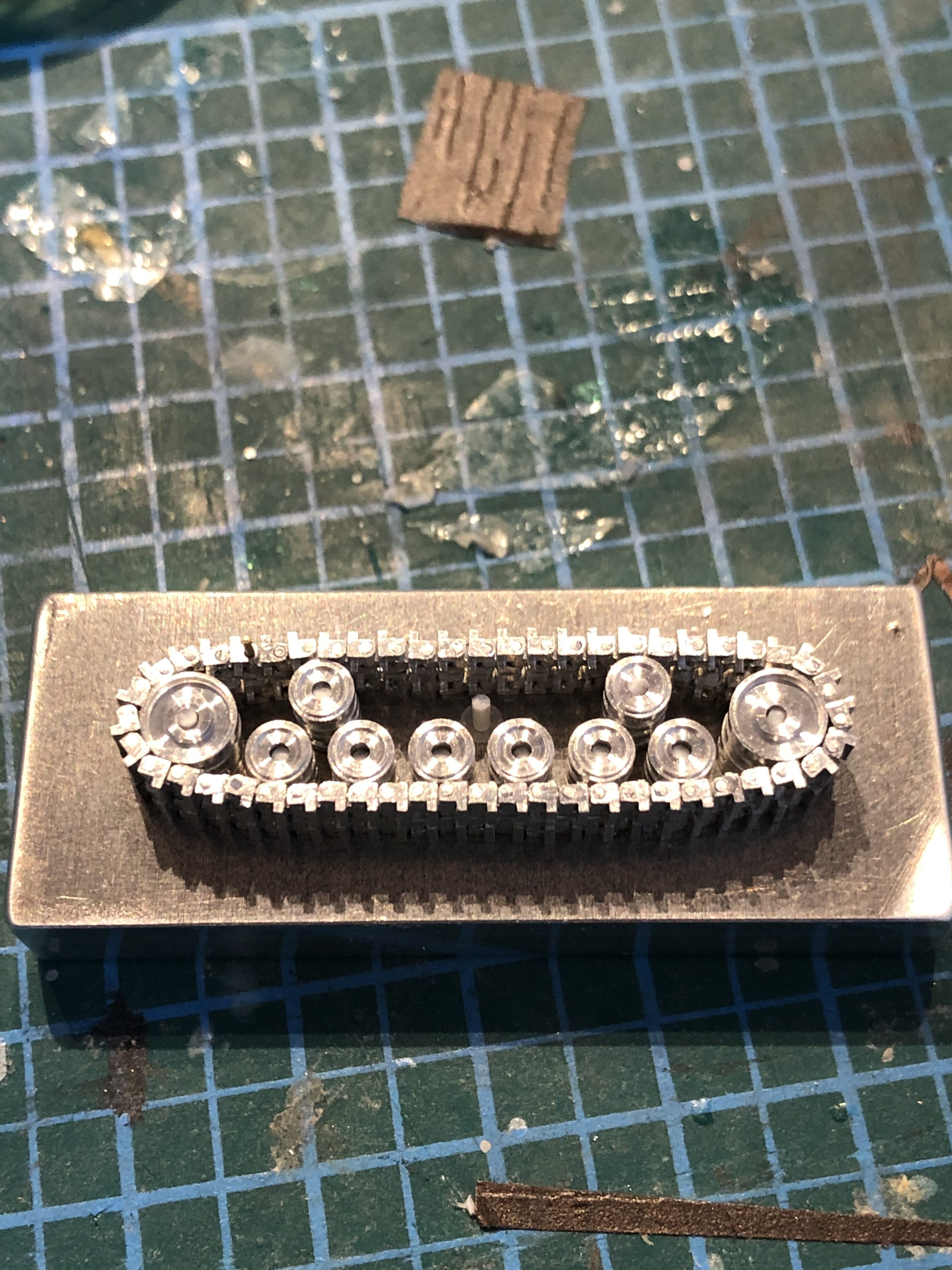
1本あたり52個の履板を連結するとちょうどいい長さの履帯になることがわかりました。
スムーズに可動します!
これで手転がし遊びができますね!
足回りの目処がついたので、次は車体の製作に入っていきます。
続く…